
| infotek | 2022-02-07 13:19 |
OptiSystem��(y��ng)�ã��������_(d��)ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����Ă�(g��)ʾ���O(sh��)Ӌ(j��)��ʾ�����ʹ��OptiSystemģ�M��z�y(c��)�͜y(c��)��ϵ�y(t��ng)��LIDAR�������w���£� �� �����}�_�w�Еr(sh��)�g�y(c��)�� �� ���Ɯy(c��)�� �� �{(di��o)�l�B�m(x��)����FMCW��ֱ�әz�y(c��)�y(c��)����{(di��o)�l�B�m(x��)����ɜy(c��)�� 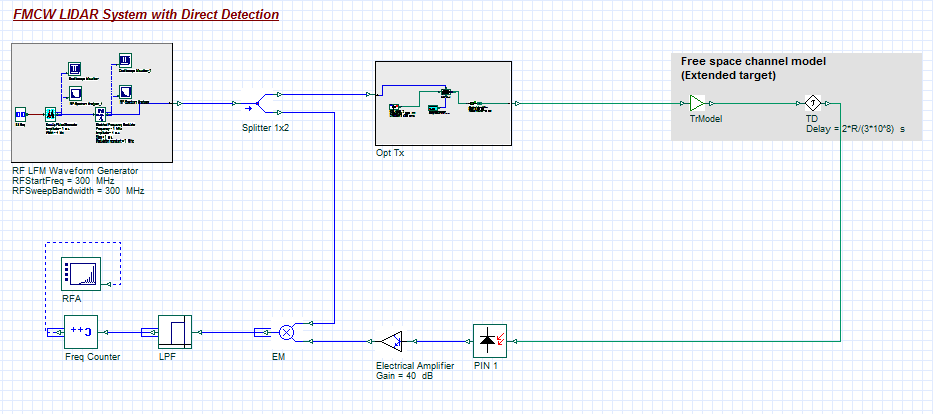 �D1.ʹ��ֱ�әz�y(c��)��FMCW LIDAR OptiSystemģ��ʾ��ҕ�D 1.�y(c��)��(�w�Еr(sh��)�g) 1��ԭ����(ji��n)�� ʹ�ü����}�_���w�Еr(sh��)�g�y(c��)�෨�y(c��)���l(f��)���}�_�İl(f��)���b�����M(j��n)��Ŀ��(bi��o)�����ؽ����������M(f��i)�ĕr(sh��)�g�� Ȼ��Ӌ(j��)����x[1]  ������̖(h��o)�����Ǹ���(j��)�U(ku��)չĿ��(bi��o)ģ�ʹ_���ģ�Ӌ(j��)������[2]  ���˿ɿ��ش_�����_(d��)�}�_�ij��l(f��)�r(sh��)�g��ʹ�ú�ȶ��r(sh��)�y(c��)��[3]��������Cpp�M����(sh��)�F(xi��n)���� 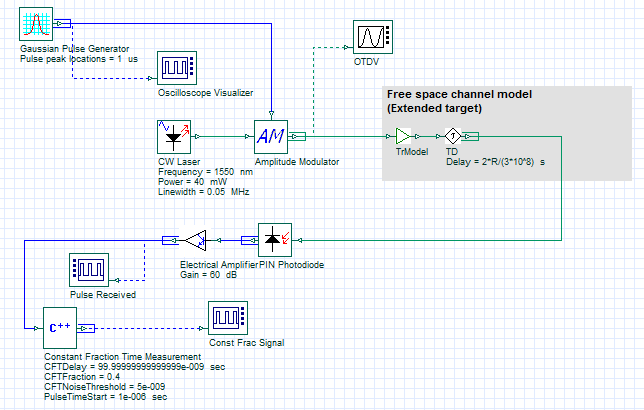 �D2.�y(c��)���x��TofF������ 2����(y��ng)�ð��� �� �����ʾ���У�һ��(g��)��˹�}�_(��ֵ�}�_�r(sh��)�g= 1 us) ��ݔ�^(gu��)���̓�MĿ��(bi��o)����(�����ɿ��g�ŵ�ģ�� (�U(ku��)չĿ��(bi��o))���x) ) ����(j��ng)�^(gu��)˥�p�����t��ͨ�^(gu��)Cpp�M����ȶ��r(sh��)�y(c��)�����z�y(c��)�ͺ�̎�����յ�����̖(h��o)�� �� ���յ����}�_���ڳ�ӕr(sh��)�g6.02e-06���|�l(f��)�ģ��M(j��n)���l(f��)�F(xi��n)ԓ������751.27 m���cȫ�օ���(sh��)�����O(sh��)�Þ�750 m����^���� ͨ�^(gu��)��׃ݔ��?y��n)��?sh��)CFTDelay��CFTFraction��CFTNoiseThreshold�����ĺ���b�e�����`���ȡ� 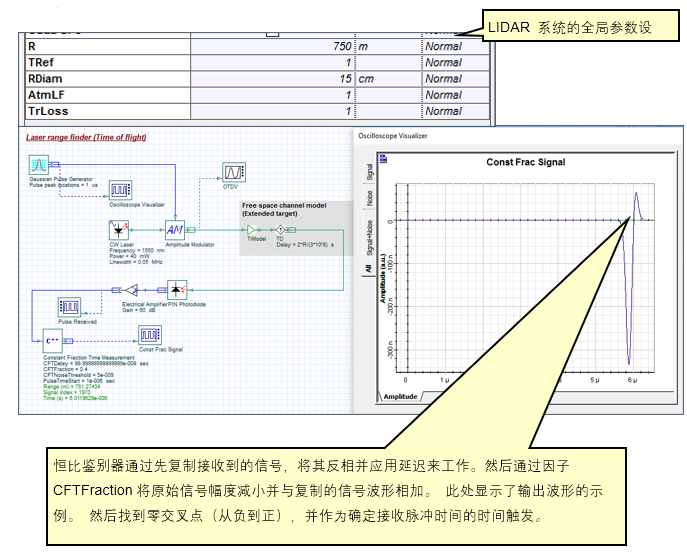 �D3.����y(c��)��ϵ�y(t��ng) 2.�y(c��)��(����) �y(c��)����(du��)��/Ŀ��(bi��o)�ľ��x����һ�N������ʹ�����Ɯy(c��)���x�� ����ԓ��������Դ���ض��l��Rf���{(di��o)�Ʋ��ҳ���Ŀ��(bi��o)���͡� Ȼ����PIN��늶��O�ܸ��S���������z�y(c��)������̖(h��o)�� ���Ɓ�(l��i)Դ��Ͷ�����̖(h��o) ()������ԭʼ������̖(h��o)����(du��)�ȣ����M(j��n)�Мy(c��)��������Ӌ(j��)����x [1]:  �������ԓϵ�y(t��ng)�ľ��ȣ������ͽ��յ��{(di��o)����̖(h��o)�����c������ʎ��RLO��ϣ��Ԍ����յIJ���׃�l���^�͵��l�ʣ�RLO-Rf���� Ȼ��(du��)�@Щ��̖(h��o)�M(j��n)�Ў�ͨ�V�����Ԝp������������λӋ(j��)��ʹ���҂��Ŀɾ���Cpp�M�����M(j��n)��̎����  �D4.�y(c��)���x�����ƣ����� 3.�y(c��)��(FMCW) �������ķ������{(di��o)�l�B�m(x��)����FMCW��LIDAR�� �ѽ�(j��ng)�_(k��i)�l(f��)�˃ɷNģ�ͣ�ֱ�әz�y(c��)��FMCW LIDAR����əz�y(c��)��FMCW LIDAR�� �ɷNģʽ�Ĺ���ԭ����ͬ�� �l���{(di��o)�ƵĹ�l(f��)�����l(f��)����̖(h��o)��Ŀ��(bi��o)������ͨ�^(gu��)��늙z�y(c��)���z�y(c��)������̖(h��o)���cԭʼ��(xi��n)���{(di��o)�l��LFM����̖(h��o)��ϡ� �S��������̖(h��o)�ĕr(sh��)�ӣ��a(ch��n)�����l��̖(h��o)�� ʹ���l��Ӌ(j��)��(sh��)�������҂���Cpp�M����(sh��)�F(xi��n)�����y(c��)���z�y(c��)����Rf��̖(h��o)��Ȼ����������Ӌ(j��)��[4]: 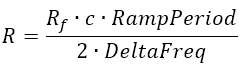 �ɂ�(g��)�z�y(c��)ϵ�y(t��ng)֮�g��Ψһ�^(q��)�e��ʹ��ƽ���əz��������һ��(g��)ʹ��������z�y(c��)���ڻ��ǰ�֏�(f��)ݔ�����̖(h��o)����������ṩ���ߵ��`���ȣ���?y��n)�z�y(c��)�^(gu��)����ɢ�������ƣ�  �D5.FMCW��əz�y(c��)����
|
|