���飺
����̽�y�͜y��
ϵ�y(t��ng)(LIDAR)
;�'dw`)~jQ qI�<6�% ^i �����Ă�ʾ���OӋ��ʾ�����ʹ��OptiSystemģ�M��z�y�͜y��ϵ�y(t��ng)��LIDAR�������w���£�
�ji`N1�e,l �SZ~�Ti|�^ �����}�_�w�Еr�g�y��
Xcicq�ywe? ���Ɯy��
{.z2n>1J{T �{(di��o)�l�B�m(x��)����FMCW��ֱ�әz�y�y����{(di��o)�l�B�m(x��)����ɜy��
X�\hD�4r"
 �#18H
�Z4N �*4r
1g+0
�#18H
�Z4N �*4r
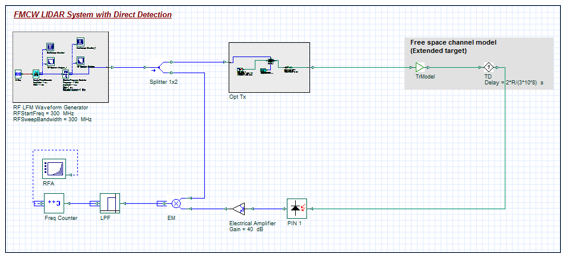
1g+0 �D1.ʹ��ֱ�әz�y��FMCW LIDAR OptiSystemģ��ʾ��ҕ�D
��.�_=Pa)T a����|32Pn 1.�y��(�w�Еr�g)
�W�k'�KN o XY1NTo.��= ԭ������
O:�RPH�{D� ,y3o�� ,gl ʹ�ü����}�_���w�Еr�g�y�෨�y���l(f��)���}�_�İl(f��)���b�����M��Ŀ�˲����ؽ����������M�ĕr�g�� Ȼ��Ӌ����x[1]
2;�5�EH�0  %]�>c�4"�H �D<#+� R"
%]�>c�4"�H �D<#+� R" c�ǹ��١�
]�OM|O�o� �9<W�M�M) ������̖
�����Ǹ���(j��)�UչĿ��
ģ���_���ģ�Ӌ������[2]
[��L|H�1ll 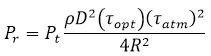 b'�O>��&V` .jZm���Qtc
b'�O>��&V` .jZm���Qtc ���� Pt �ǂ�ݔ��ʣ�D �ǽ��������� �� Ŀ�˷����ʣ�

�Ǵ��p��ϵ��(sh��)��

�ǹ��ݔϵ�y(t��ng)�p�����ӣ�R ��Ŀ�˷�����
>���z��
h R(=�Lhz6R4 ���˿ɿ��ش_�����_�}�_�ij��l(f��)�r�g��ʹ�ú�ȶ��r�y��[3]��������Cpp�M�����F(xi��n)����
�#DwTm~V0" 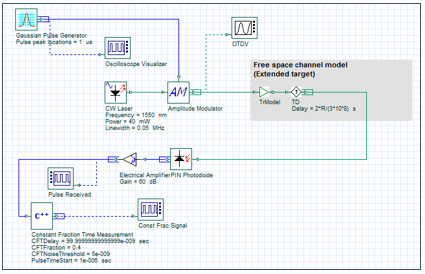 q*�Yh_IT.I 5l2P��h4( ]�/H�SlT=
q*�Yh_IT.I 5l2P��h4( ]�/H�SlT= �D2.�y���x��TofF������
AR]y p{NS R�hnSQe��� ����
� ^P~%^?(� y��;y�XOE_ �����ʾ���У�һ����˹�}�_(��ֵ�}�_�r�g= 1 us) ��ݔ�^���̓�MĿ�˷���(�����ɿ��g�ŵ�ģ�� (�UչĿ��)���x) ) ����(j��ng)�^˥�p�����t��ͨ�^Cpp�M����ȶ��r�y�����z�y�ͺ�̎�����յ�����̖��
&'N{v@Oi)� P��Nd]Xmv) ���յ����}�_���ڳ�ӕr�g6.02e-06���|�l(f��)�ģ��M���l(f��)�F(xi��n)ԓ������751.27 m���cȫ��
����(sh��)�����O�Þ�750 m����^���� ͨ�^��׃ݔ��?y��n)��?sh��)CFTDelay��CFTFraction��CFTNoiseThreshold�����ĺ���b�e�����`���ȡ�
*p�k�*ijdB 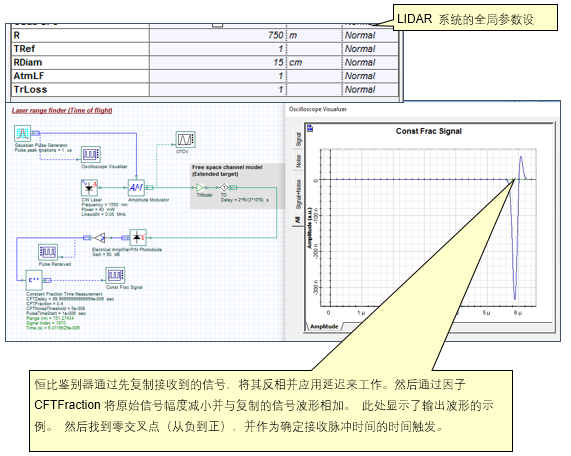 �['sj'3cW- ��26yv w
�['sj'3cW- ��26yv w �D3.����y��ϵ�y(t��ng)
_�$NFeqLww ���3@J0-�w 2.�y��(����)
.rD@Q{e50 x<"1T
�w5e �y������/Ŀ�˵ľ��x����һ�N������ʹ�����Ɯy���x�� ����ԓ������
��Դ���ض��l��Rf���{(di��o)�Ʋ��ҳ���Ŀ�˂��͡� Ȼ����PIN��늶��O�ܸ��S���������z�y������̖�� ���Ɓ�Դ��Ͷ�����̖ ()������ԭʼ������̖�����ȣ����M�Мy��������Ӌ����x [1]:
8V;@yzI�ha 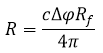 9loWh5_�1Z �d47b&.v8e A$�WE�:�<^
9loWh5_�1Z �d47b&.v8e A$�WE�:�<^ �������ԓϵ�y(t��ng)��
�����������ͽ��յ��{(di��o)����̖�����c������ʎ��RLO��ϣ��Ԍ����յIJ���׃�l���^�͵��l�ʣ�RLO-Rf���� Ȼ���@Щ��̖�M�Ў�ͨ�V�����Ԝp������������λӋ��ʹ���҂��Ŀɾ���Cpp�M�����M��̎����
S� WVeUL#5 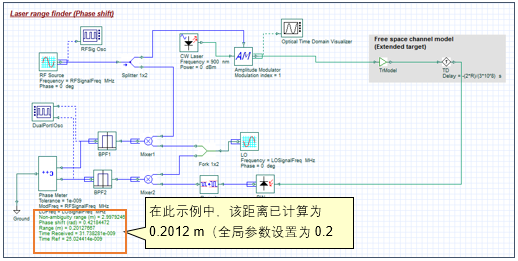 "'4���R�_R gt�yo���~f I0(BKMp&
��Ȫ��|
�ֶ�����|
������|
����|
������|
������|
������|
������|
������|
������|
�����|
������|
�ϻ���|
������|
������|
ʼ����|
�����|
�ǹ���|
������|
Ӫɽ��|
ɽ��|
��˷��|
������|
���������|
��ҵ��|
��ɽ��|
��ɽ��|
��ˮ��|
¹����|
¤����|
������|
��˼��|
��ˮ��|
��ϼ��|
������|
�ȳ���|
������|
������|
������|
��կ����|
��ƽ��|
"'4���R�_R gt�yo���~f I0(BKMp&
��Ȫ��|
�ֶ�����|
������|
����|
������|
������|
������|
������|
������|
������|
�����|
������|
�ϻ���|
������|
������|
ʼ����|
�����|
�ǹ���|
������|
Ӫɽ��|
ɽ��|
��˷��|
������|
���������|
��ҵ��|
��ɽ��|
��ɽ��|
��ˮ��|
¹����|
¤����|
������|
��˼��|
��ˮ��|
��ϼ��|
������|
�ȳ���|
������|
������|
������|
��կ����|
��ƽ��|


��������K")