光纖陀螺儀
系統(tǒng)設(shè)計:DC檢測方法[1]
D�#3\y*-y? Q_[ 3�`j�l 使用理想元件,輸出
光電流(I)為
H�Z'_r cv�  9I&xf�vD�,
9I&xf�vD�, 其中
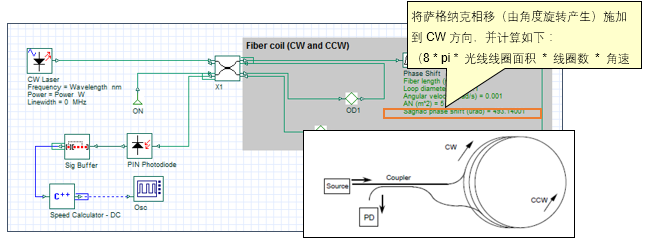
φs 是薩格納克相移 , Io 是以零角速度情況計算出的電流
+j< p
\Kn>  �wK?v�PS��
�wK?v�PS�� P 是
光源光功率, σ 是光電檢測器的響應(yīng)度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因為在耦合器處功率損失了一半。 一旦
φs 確定了, 我們可以計算
5`~P�R
:dN  tfj:@Z5&$C
tfj:@Z5&$C 其中 L 是
光線長度, D 是環(huán)直徑, λ 是光源
波長,由此來確定環(huán)路Ω 的角速度。注意,由于等式(1)具有余弦,因此直流技術(shù)無法區(qū)分正負(fù)速度。
 vX/��T3WV
vX/��T3WV
圖1 FOG DC檢測布局
光纖陀螺儀系統(tǒng)設(shè)計:相位調(diào)制方法[1]
�3�yVMX�K� #qK:J;Sn3� 當(dāng)嘗試測量非常低的角旋轉(zhuǎn)速率時,DC方法不是很準(zhǔn)確,所以通常使用相位調(diào)制技術(shù)。 對于該設(shè)置,光檢測信號
G3Z)��Z)�N &5�yV�xL:� KV�(Q;~8"X 將相位調(diào)制器幅度選擇到+/-0.9 rad ,給出最大化J1(Φm) = 0.581517 的項Φm = 1.8 。提取調(diào)制頻率ωm的余弦級數(shù)
�SLa�>7`<Q �U|jSa,�} hb}+�A=A=+ 公式3得到角速度。我們可以重新排列找到φ_𝑠,然后再次使用公式(3)找到角速度。 注意,在這種情況下,由于等式(5)具有正弦關(guān)系,所以我們可以確定角速度的大小和方向。另外,在這種情況下, 在等式(2)中,零速電流不是𝐼_𝑜=𝜎𝑃/2 而是 𝐼_𝑜=𝜎𝑃/8因為在光到達(dá)光電二極管的時候,其功率已經(jīng)被耦合器減半了三次。
aDU<wxnSvO 圖2 OptiSystem設(shè)計的調(diào)制技術(shù)原理圖(資料來源:REF)(注:光纖偏振器未包含在設(shè)計中) E|iQc8g�r&
清远市|
确山县|
丹棱县|
宁德市|
巴林右旗|
石家庄市|
法库县|
巴楚县|
盐源县|
浏阳市|
大厂|
广昌县|
乌鲁木齐县|
元谋县|
盐池县|
吴桥县|
鸡泽县|
罗城|
太仓市|
普洱|
乌审旗|
洛扎县|
开鲁县|
尉犁县|
双江|
华宁县|
抚州市|
建湖县|
宁乡县|
那坡县|
天柱县|
景德镇市|
宁夏|
磐石市|
文安县|
SHOW|
丽水市|
鄂尔多斯市|
无锡市|
西丰县|
玉龙|


至其他版塊")