| infotek | 2021-11-08 09:51 |
半徑干涉測量技術的物理光學建模1. 簡介 半徑干涉測量通常通過簡單的幾何模型來模擬,即,來自物鏡(或標準透鏡)的光線形成錐形并且聚焦到一點[1]。當測試光學器件變小和/或需要更高的精度時,這個簡單的幾何模型就會產(chǎn)生問題并得到錯誤的半徑測量值。需要完整的物理光學模型來捕獲系統(tǒng)的衍射效應和像差。 半徑干涉測量的原理圖如圖1所示。菲索或泰曼格林干涉儀都可用于半徑測量。在菲索干涉儀中,標準透鏡用作聚焦元件、分束和參考表面。在泰曼格林干涉儀中,使用分束器將光分成參考反射鏡和物鏡,它可以將光束聚焦到測試部件。 通過首先將部件放置在共焦位置,然后將部件移動到貓眼位置,并測量部件移動的距離,來測量測試部件的半徑,該距離就是測試部件的半徑。當澤尼克多項式[1]的離焦項為零時,共焦和貓眼位置重合。在視覺上,靶心環(huán)是空的。因為操作者不能將部件準確地放置在所需的位置,所以用于確定共焦和貓眼位置的最準確的方法是逐步通過這兩個位置。當操作者以小步幅移動部件通過共焦和貓眼時,我們記錄離焦和Z位置。然后,我們用一條線擬合離焦VS.Z位置。共焦和貓眼位置是Z位置軸上的截距。這種通過共焦和貓眼步進的方法可用于精確半徑測量[2],我們在這里用于半徑測量的模擬。 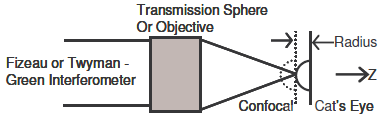 圖1:半徑干涉測量幾何模型原理圖 在NIST的精密半徑干涉測量實驗顯示了標稱24.466mm半徑的Zerodur球的測量之間的差異。球體由坐標測量儀機械測量,同時在使用不同標準透鏡的干涉儀上光學測量[2]。即使考慮了測量中的所有已知偏差和不確定性,這種在75nm至400nm范圍內(nèi)的差異仍然存在。對于這種差異的解釋可能是光被假定遵循幾何模型而不是更準確的物理光學模型,我們將在這里進行測試。 在光的幾何模型中,當透鏡的頂點與光的焦點(發(fā)生在距離聚焦元件一個焦距處)重合時,就會出現(xiàn)貓眼位置。然后,共焦位置距離貓眼位置一個半徑。在非像差幾何模型中,這發(fā)生在聚焦元件的波前的曲率等于測試部件的曲率時。 半徑測量的高斯模型表明了當使用幾何模型而不是更復雜的高斯模型時,半徑測量中存在誤差[3]。對于較小的半徑部分(<1mm),這個誤差是在105部件的量級,而對于較大的部件(25mm),有接近108部件的誤差。當考慮具有半徑像差的高斯模型時,NIST [2]的研究者發(fā)現(xiàn)了6nm的誤差(107部件)。這些像差是由標準透鏡和系統(tǒng)中的其他光學元件的缺陷引起的。 下一步是考慮物理光學模型。當然,焦點區(qū)域的分析計算是不可行的,因此需要近似。對于這種物理光學模型,我們使用來自Photon Engineering的軟件包FRED [4]。 2. FRED模型 FRED通過將光源光束近似為點網(wǎng)格來近似物理光學模型,其中每個點發(fā)出高斯分布“子束”。 每個高斯子束以ABCD矩陣方法[5]傳輸通過光學系統(tǒng)。在每個子束通過系統(tǒng)之后,疊加“探測器”上子束的波前,以近似物理光學模型。FRED是一個可視化軟件包,其中透鏡、反射鏡和光源都顯示在它們的相對位置。FRED不執(zhí)行幾何分析。 為了模擬半徑測量,我們首先插入每個元件(光源、聚焦透鏡、測試部件和探測器)到FRED文件中。然后追跡來自光源的光線。光線由聚焦元件聚焦,從測試部分反射,再由聚焦元件準直,然后在探測器處讀取。在探測器處的期望輸出是波前的相位。我們按照所述步驟通過共焦和貓眼位置,并獲得每個點的相位圖。然后我們使用Matlab讀取相位數(shù)據(jù)和Z位置,以確定共焦和貓眼的位置。半徑是兩個位置之間的差,半徑誤差是測試部件的輸入半徑和輸出半徑之間的差。 我們在模擬半徑測量中使用了兩個不同的光源。我們測試了在整個圓形孔徑上具有恒定強度和相位的圓形孔徑光束,這模擬了最佳實驗裝置。第二個光源是高斯強度光束,通過改變子束的強度,使得強度的疊加是高斯分布,來形成該高斯光束。光源波長為632.8nm(氦-氖),并設置為相干。子束的數(shù)量可以改變,并且影響測量的時間和輸出相位。我們測試了不同孔徑尺寸的光源,從直徑為4mm的微干涉儀到直徑為150mm的大尺度干涉儀。 | |