| infotek | 2025-06-23 07:59 |
VirtualLab Fusion應(yīng)用:畸變分析儀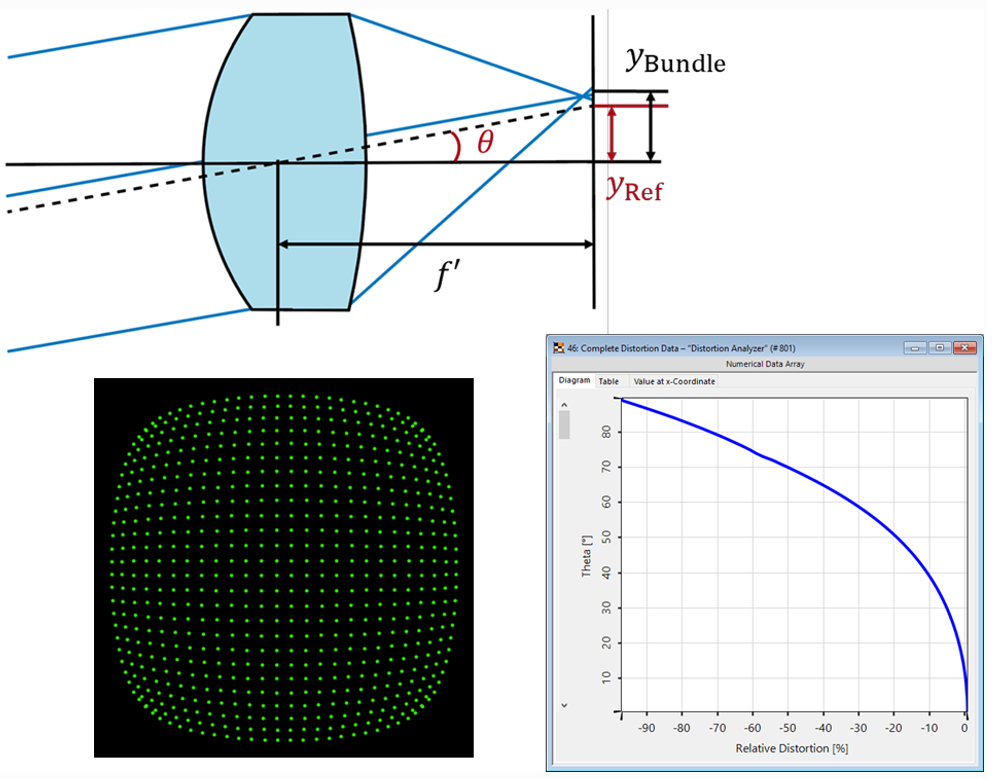 鏡頭是成像系統(tǒng)設(shè)計(jì)的一個組成部分。因此,對任何光學(xué)工程師來說,能夠詳細(xì)分析它們的性能是至關(guān)重要的。一個眾所周知的不利影響是畸變,它導(dǎo)致光束的橫向位置相對于焦平面的參考位置的偏差。在這個使用案例中,我們介紹了一個工具,以球面透鏡為例,研究這種效應(yīng)。 畸變定義 畸變與主光線的球面像差相對應(yīng)。它被定義為光線束的橫向位置相對于焦平面的參考位置的偏差。使用掃描鏡頭的有效焦距(𝑓'),可以計(jì)算出焦平面的參考位置,這主要取決于入射角。 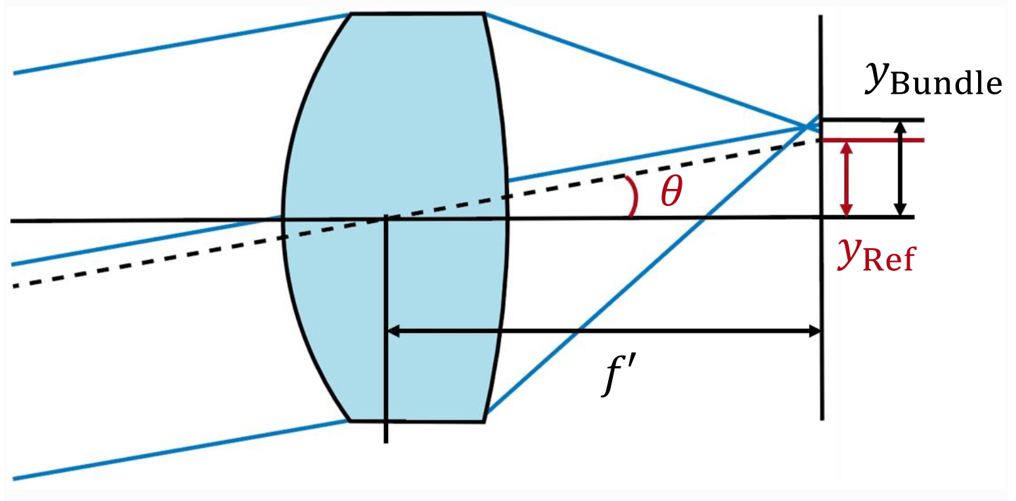  f’:有效焦距。 θ:入射角度。 yBundle:光線束的側(cè)向位置 yRef:參考光線的側(cè)向位置 畸變定義 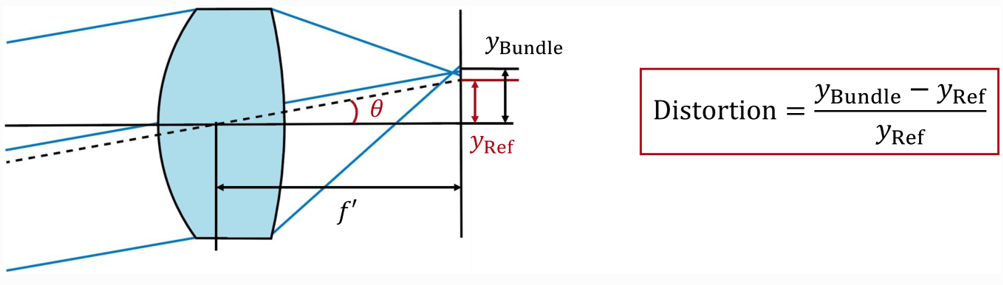 F-tan(theta)畸變:yRef=f’tan(θ) F-theta畸變:yRef=f’θ 光線束的位置(𝑦Bundle)。 - Central ray:連接視野的外點(diǎn)和瞳孔的中心 - Centroid:與物理相關(guān)的是能量中心點(diǎn) 哪里可以找到畸變分析器  要分析的組件 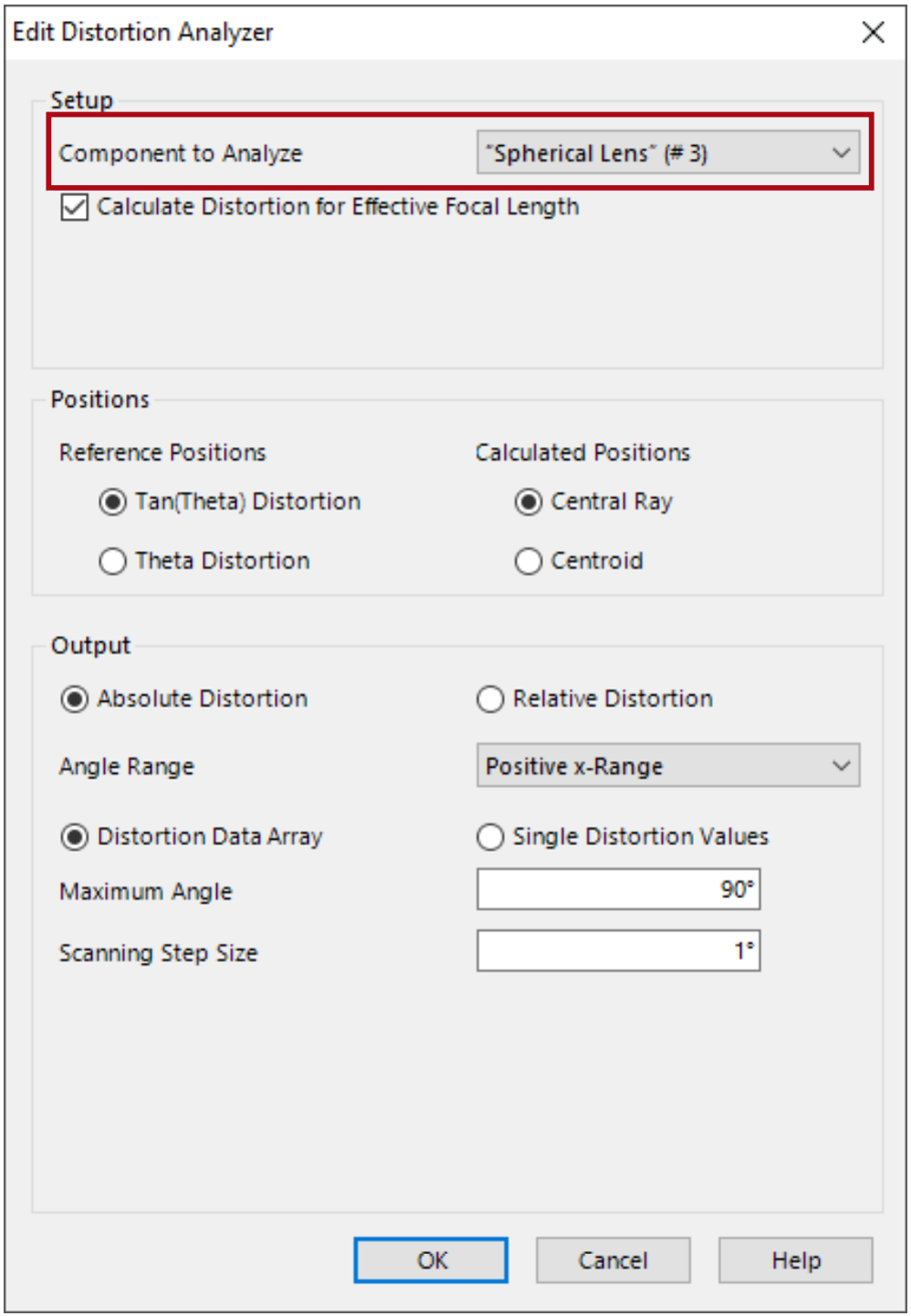 畸變分析器計(jì)算由透鏡或物鏡在定義的角度范圍內(nèi)引入的光束的畸變。它的工作獨(dú)立于實(shí)際的光學(xué)系統(tǒng)及其參數(shù),因此,具體的參數(shù)需要在分析器內(nèi)定義。 要分析的組件:定義應(yīng)分析的組件。一個下拉菜單將顯示所有可用的選項(xiàng)。如果有多個具有相同名稱的組件,組件下面的索引將有助于區(qū)分它們。 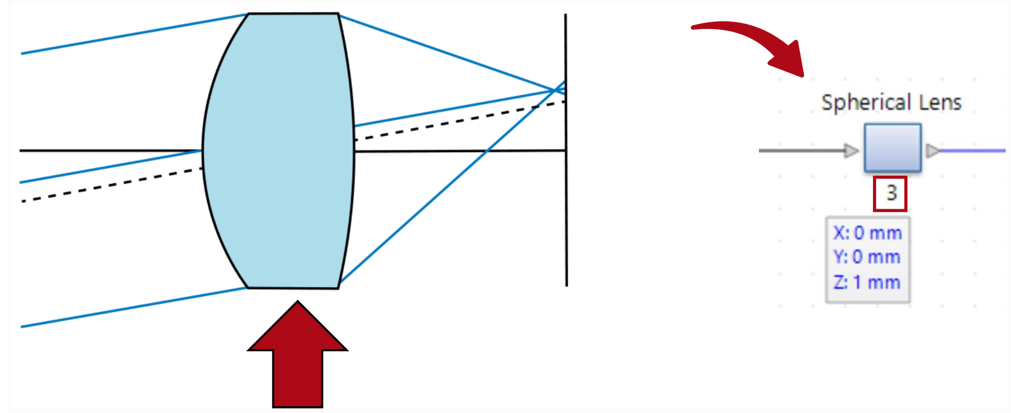 有效焦距 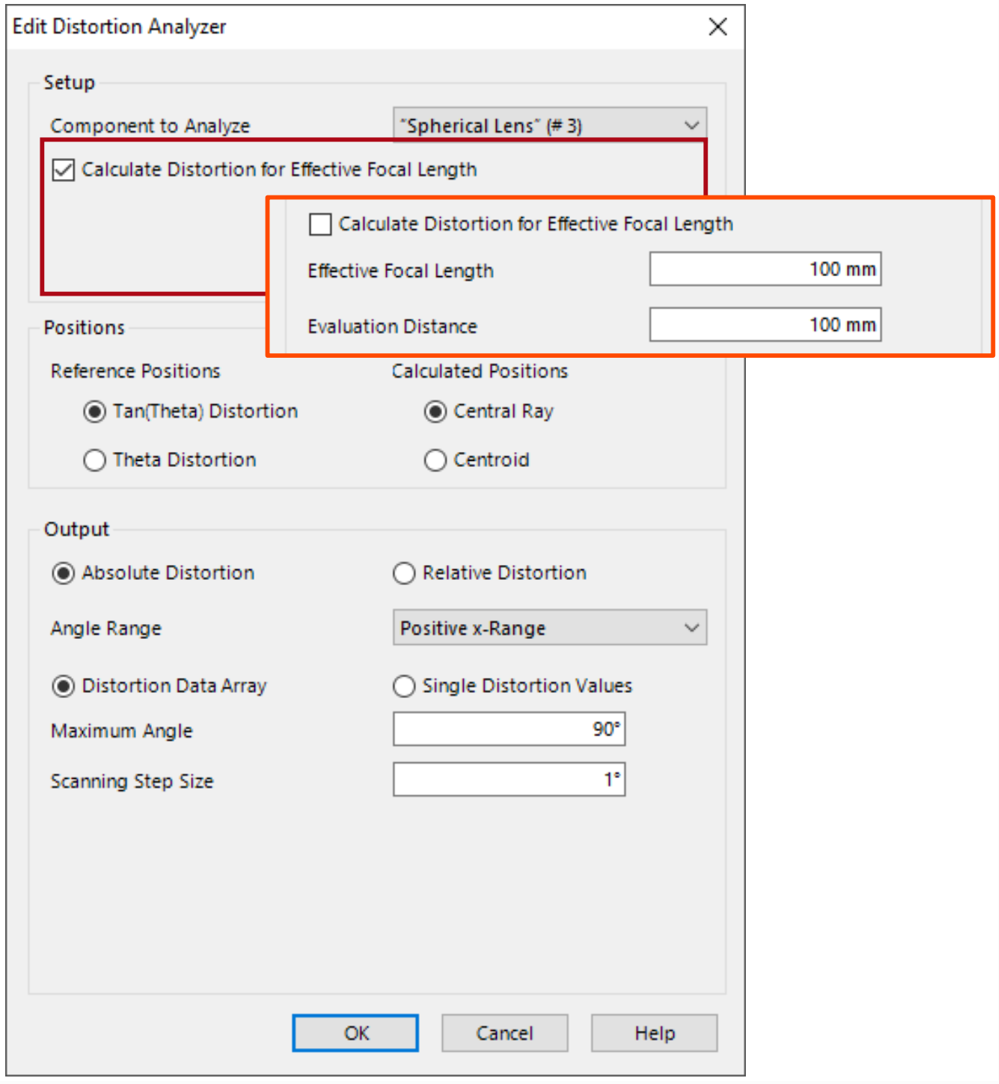 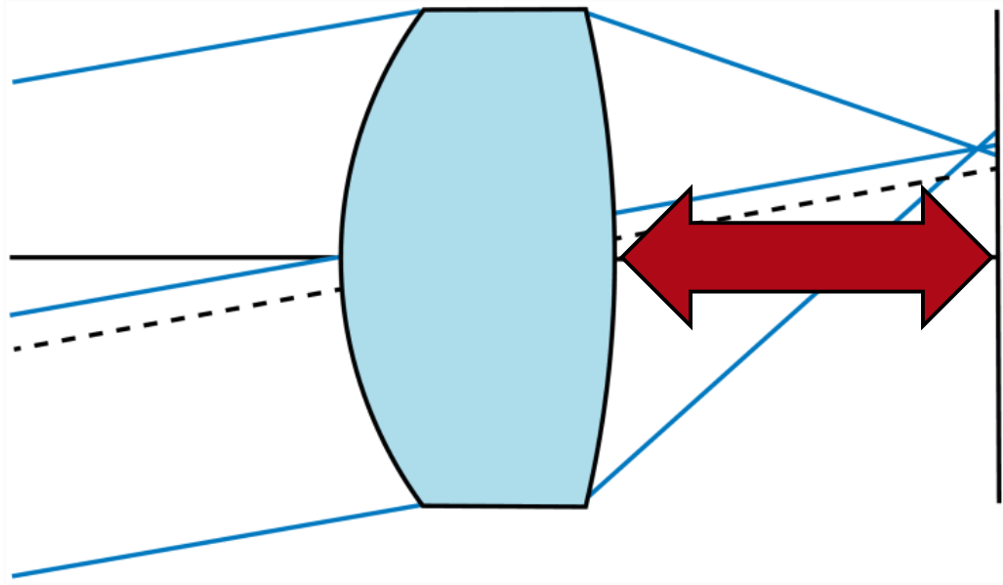 計(jì)算有效焦距的失真:如果該選項(xiàng)被選中,有效焦距(𝑓′)將通過評估所選組件自動確定。否則,可以根據(jù)用戶的要求設(shè)置評估距離。 分析器的設(shè)置 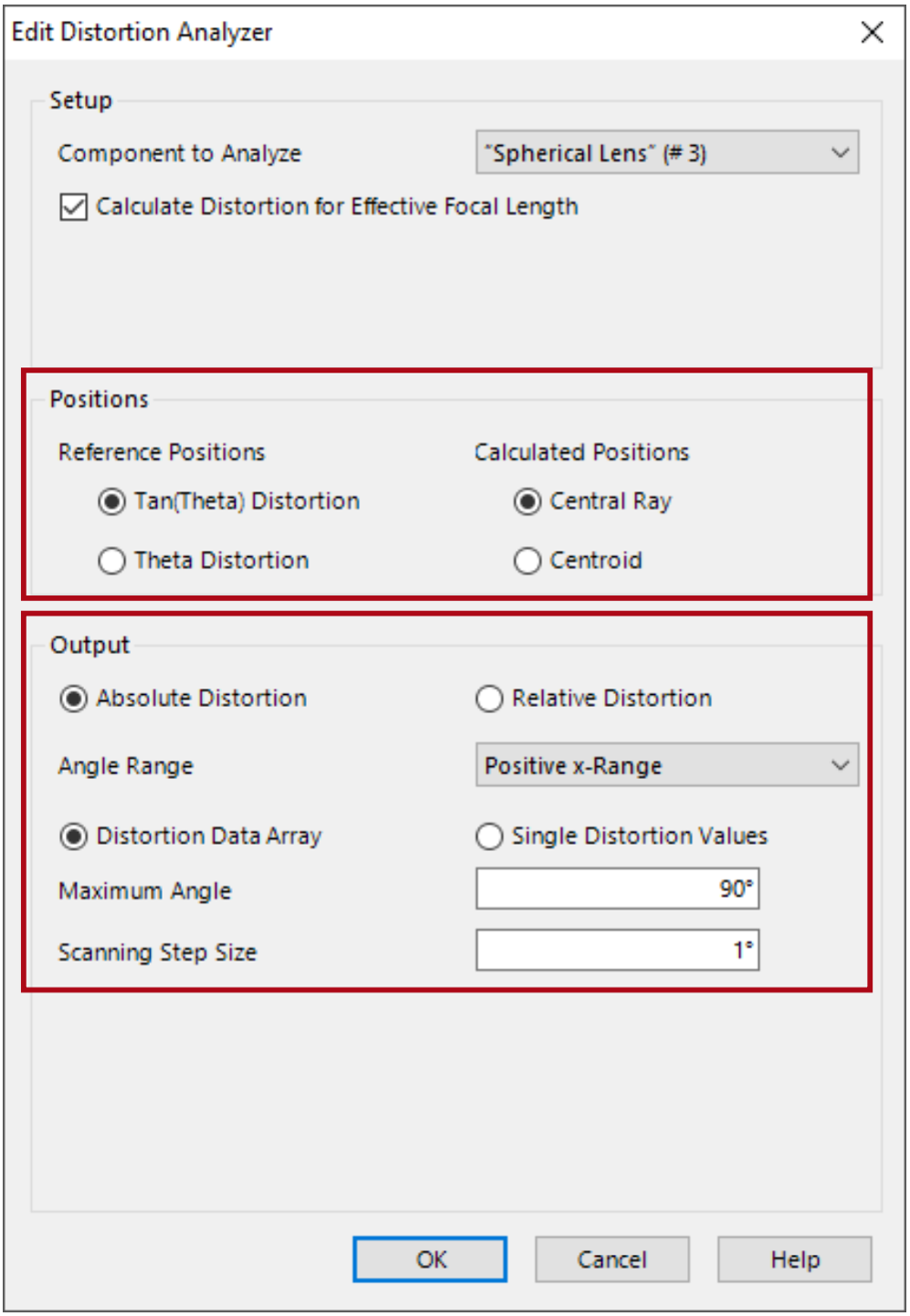 位置(畸變類型,見第4頁) - 參考位置 - 計(jì)算的光線束位置 | |